Students learn how a robotic race car moves by exploring its chassis, wheels, suspension, speed, balance, and steering. They then work with the sensors, circuits, and control systems that help a Formula 1/10 car navigate a real track. Through hands-on activities, students build programming skills and see how autonomous systems are designed to be fast, reliable, and safe. The program emphasizes teamwork, experimentation, and problem-solving. By the end of the program, students will be able to:
- Learn beginner-friendly programming in Python or C/C++
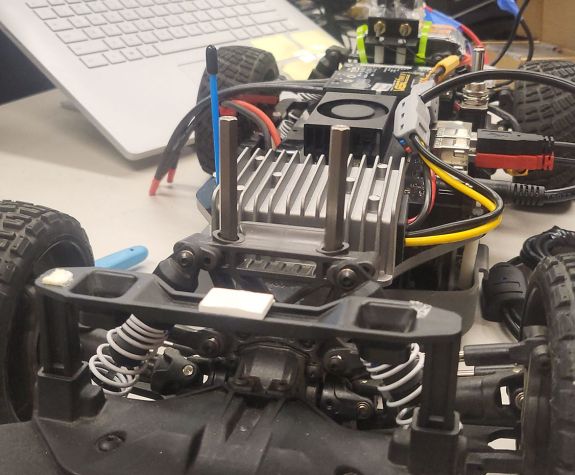
- Work with Arduino UNO and NVIDIA Jetson Orin Nano systems
- Program the car to move, turn, stop, and follow lanes or walls
- Understand the mechanical systems that make the car stable and responsive
- Use sensors such as cameras, LiDAR, and IMUs to detect motion and surroundings
- Explore how autonomous cars follow paths and avoid obstacles
- Test and race their cars in both remote-controlled and autonomous modes
- Gain a strong introduction to robotics and AI concepts
No prior robotics experience is required—just curiosity and a willingness to learn.